Jacob Pettit

My dogs and I at Land's End in San Francisco. My wife took this photo.
Welcome!
My name is Jacob Pettit and I’m a machine learning researcher at Lawrence Livermore National Laboratory. I have my Bachelor’s degree in Computational Science from Florida State University (FSU). My research focuses on reinforcement learning and its applications, and leveraging reinforcement learning for discrete optimization (like in neural architecure search).
I keep a weekly blog sharing papers and code called The Merge and a personal blog named Welcome to My Brain. Consider subscribing if either (or both) interest you!
Links to selected blog posts
- We need more Moonshots
- Weird RL with hyperparameter optimizers part-1 part-2
- Breaking a Pong-playing RL agent
Publications
- “Learning sparse symbolic policies for sepsis treatment” paper-pdf
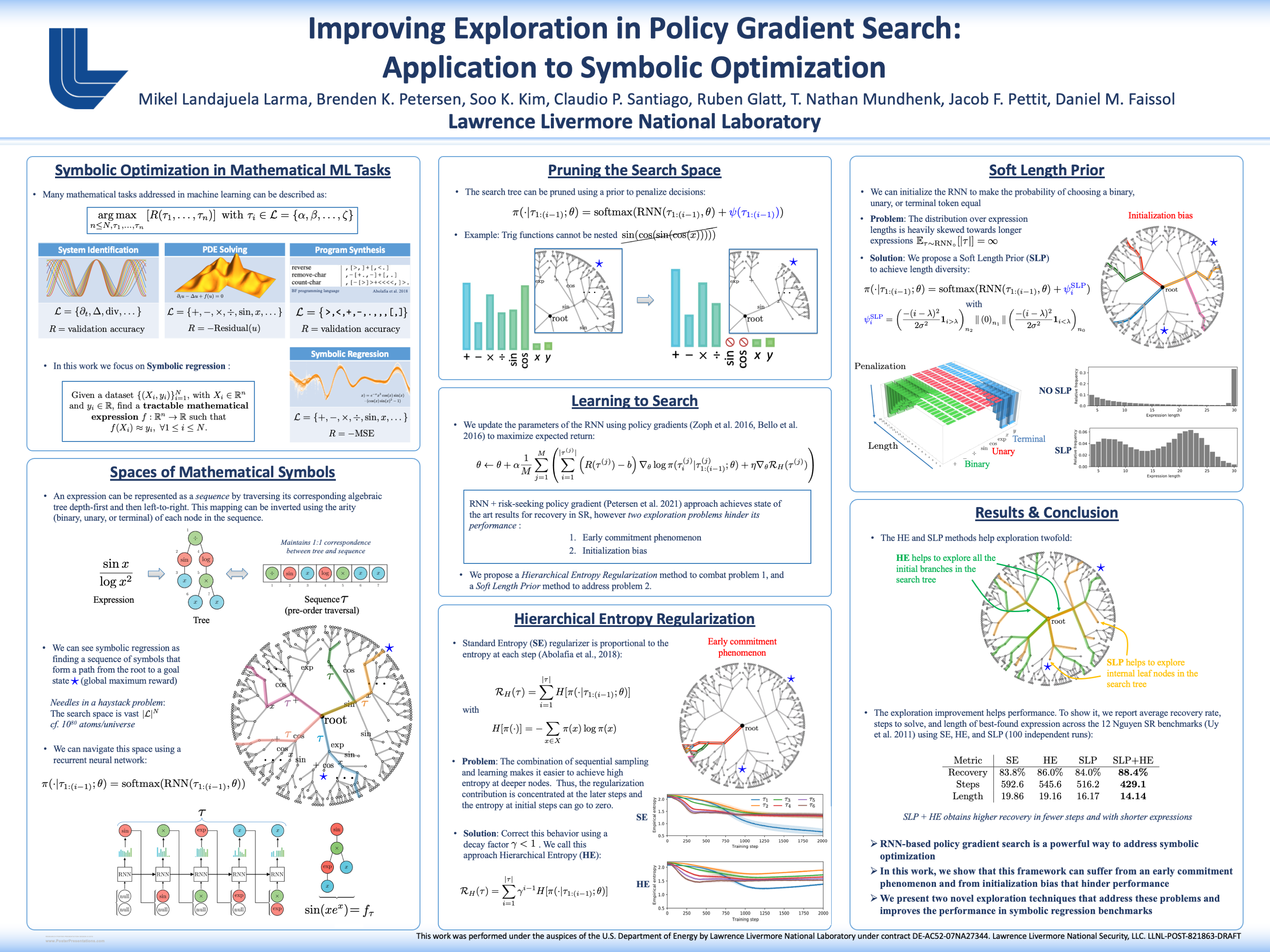
- “Improving Exploration in Policy Gradient Search: Application to Symbolic Optimization” paper-pdf poster-pdf
- “Machine Learning Models for Identifying Risk Factors and Prediction of ALS Progression” talk-video
- “Increasing performance of electric vehicles in ride-hailing services using deep reinforcement learning” arxiv-paper talk-video
{kind=link}
About Me
You’ve heard about my work stuff up at the top, so I’m not going to talk about that here. I’ve got several hobbies, chief among them are climbing, surfing, making fancy coffee (e.g. Aeropress or Chemex) and hiking with my wife and our dogs. I consider myself a bit of a foodie. I’m generally curious and am often learning something new about some branch of science or math that’s completely unrelated to my job. Thanks for reading!
Contact
Find me on twitter or LinkedIn or email me at jfpettit [at] gmail [dot] com.